Product Information
Solutions
Technical Information
Motor Sizing
Downloads
Virtual Showroom
Contact Us
Servo Motors > Servo Motor Only > Hybrid Servo Motor / Stepper Motors > αSTEP AZ Series Hybrid Servo Motor / Stepper Motors
AZ Series Hybrid Servo Motor / Stepper Motors

αSTEP Hybrid Step-Servo
AZ Series Hybrid Servo Motor / Stepper Motors
The αSTEP AZ Series Hybrid Servo Motor / Stepper Motors offer high efficiency, low vibration and incorporates our newly developed Mechanical Absolute Encoder for absolute-type positioning without battery back-up or external sensors to buy. Closed loop performance without hunting or gain tuning. Available with a built-in controller or pulse input driver which substantially reduces heat generation from the motor through the use of high-efficiency technology. Requires αSTEP AZ Series Driver.
- Battery-Free, Mechanical Absolute Encoder
- Closed Loop Performance, No Hunting or Gain Tuning
- AC Input
- Wide Range of Gear Types for Inertia Matching & Higher Torque
- Electromagnetic Brake Type Available
- αSTEP AZ Series Driver Required*

Mechanical Absolute Encoder
Product Lineup
Frame Size |
Motor Types |
Available Options |
Max. Holding Torque |
|
|
Standard Type |
Electromagnetic Brake |
42 ~ 109 oz-in |
0.3 ~ 0.77 N·m |
Geared Type |
92 ~ 4149 oz-in |
0.65 ~ 29.3 N·m |
||
|
Standard Type |
Electromagnetic Brake |
142 ~ 280 oz-in |
1 ~ 2 N·m |
Geared Type |
254 ~ 5664 oz-in |
1.8 ~ 40 N·m |
||
AC Input |
Standard Type |
Electromagnetic Brake |
280 ~ 460 oz-in | 2 ~ 4 N·m |
Geared Type |
53 ~ 752 lb-in | 6 ~ 85 N·m | ||



Mechanical Type Absolute Encoder
Advanced Technology at Affordable Prices
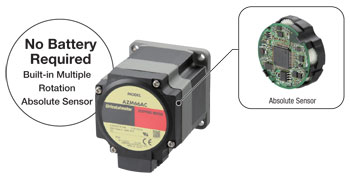
Oriental Motor has developed and patented a compact, low-cost, battery-free mechanical type absolute sensor. The αSTEP AZ Series is available at affordable prices and can contribute to improved productivity and cost reductions.
Mechanical-Type Encoder (No Battery Required)
A mechanical sensor composed of multiple gears is employed. Positioning information is detected by recognizing the angle of the individual gears. As a result, it does not require a battery.
Multiple-Rotation Absolute System*
Absolute position detection is possible with ±900 rotations (1800 rotations) of the motor shaft from the home position.
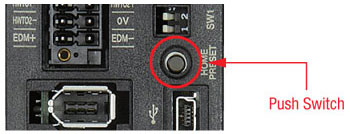
Home Setting Method*
The home position can be easily set by pressing a switch on the drivers surface, which is saved by the Mechanical Absolute Encoder. In addition, home setting is possible with the MEXE02 data setting software or external input signal.
Home position is easy to adjust by moving the motor to a desired position manually.
*Requires AZ Series Driver
No External Sensors Required
Positional information is managed mechanically. External sensors such as home sensor and the limit sensor are not needed.
Reduced Cost
Sensor costs and wiring costs can be reduced, allowing for lower system costs.
Simple Wiring
Wiring is simplified and the degree of freedom for equipment design is increased.
Not Affected by Sensor Malfunctions
There is no concern about sensor malfunctions (when operating in environments filled with oil mist or filled with metal pieces due to metal processing), sensor failures or sensor wire disconnections.
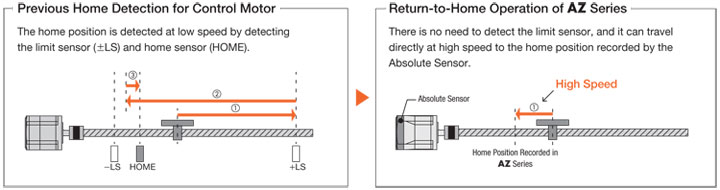
Improved Return-to-Home Accuracy
Home position accuracy is increase because the return-to-home operation is performed regardless of any variations in home sensor sensitivity.
Shortened Reset Time - High Speed Return-to-Home
Because return-to-home is possible without an external sensor, return-to-home can be performed at high speed without taking the sensor sensitivity into account, allowing for a shortened machine cycle.
No Battery Required
No battery is required thanks to a mechanical-type sensor. Because positioning information is managed mechanically by the Mechanical Absolute Encoder, the positioning information can be preserved, even if the power turns off, or the cable between the motor and the driver is disconnected.

Reduced Maintenance
Because there is no battery that needs replacement, maintenance time and costs can be reduced.
Unlimited Driver Installation Possibilities
Because there is no need to secure space for battery replacement, there are no restrictions on the installation location of the driver, improving the flexibility and freedom of the layout design of the control box.
Safe for Overseas Shipping
Normal batteries will self-discharge, so care must be taken when the equipment requires a long shipping time, such as when being sent overseas. The Mechanical Absolute Encoder does not require a battery, so there is no limit to how long the positioning information is maintained. In addition, there is no need to worry about various safety regulations, which must be taken into consideration when shipping a battery overseas.
Position Holding Even when the Cable between the Motor and Driver is Detached
Positioning information is stored within the Mechanical Absolute Encoder.
*Because the positioning information is stored in the Mechanical Absolute Encoder, the home position must be reset if the motor is replaced.
High Reliability
High Reliability is provided by using the control method unique to Oriental Motor that combines the merits of both open loop control and closed loop control.
Continues Operation Even with Sudden Load Fluctuation and Sudden Acceleration
In normal conditions, it operates synchronously with pulse commands under open loop control, and because of its compact size and high torque generation, it has excellent acceleration performance and response. In an overload condition, it switches immediately to closed loop control to correct the position.
Alarm Signal Output in Case of Abnormality
If a continuous overload is applied, an alarm signal is output. Also, when the positioning is completed, a signal is output. This provides high reliability.
No Tuning Required
Because it is normally operated with open loop control, positioning is still possible without gain tuning even when the load fluctuates due to the use of a belt mechanism, cam or chain drive, etc.
Holding the Stop Position
During positioning, the motor stops with its own holding force without hunting. Because of this, it is ideal for applications where the low rigidity of the mechanism requires absence of vibration upon stopping.
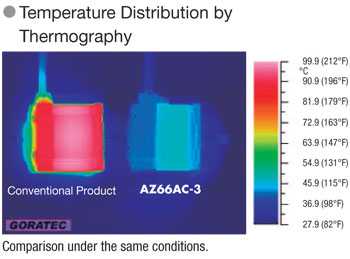
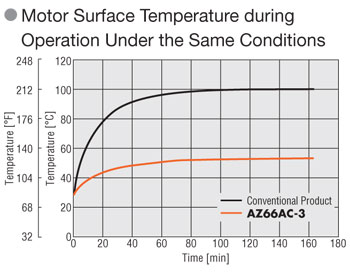
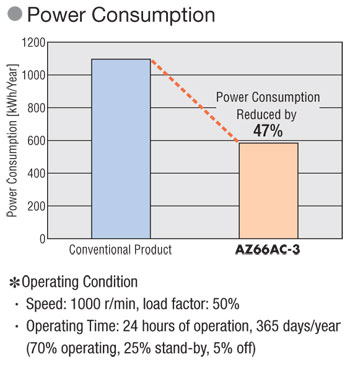
Energy Saving
Heat generation is reduced thanks to the high efficiency motor, resulting in energy savings.
Lower Heat Generation
Heat generation by the motor has been significantly reduced through higher efficiency.
Taper Hobbed Gear Hybrid Servo Motor / Stepper Motors (TS)
- 1.65 in. (42 mm)
- 2.36 in. (60 mm)
- 3.54 in. (90 mm)

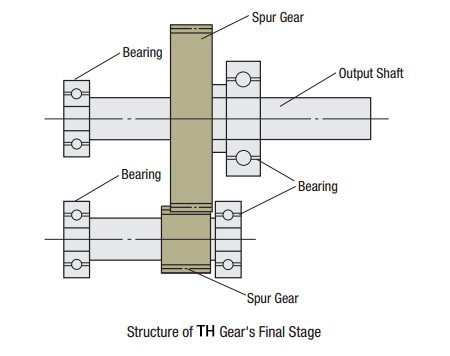
High Speed, Low Backlash Gears
This geared type is made with a simple spur gear design. The torque and speed have been improved.
Because of its high accuracy, this type has the same level of accuracy when compared to our tapered (TH) type without the added cost of tapering.
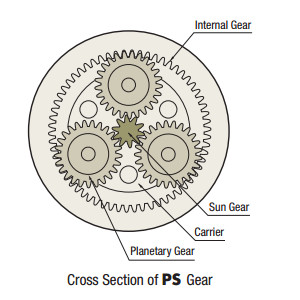
Planetary Gear Hybrid Servo Motor / Stepper Motors (PS)
- 1.65 in. (42 mm)
- 2.36 in. (60 mm)
- 3.54 in. (90 mm)

High Torque, Low Backlash Gears
The PS gear mechanism is comprised primarily of a sun gear, planetary gears and an internal tooth gear. The planetary gears design allow for higher output torque.
There are gears inside used to distribute torque, which allows for higher torque than a spur gear design. The PS gear uses a higher accuracy gear design which provides for a lower backlash when compared to a spur gear design.
Harmonic Planetary Gear Hybrid Servo Motor / Stepper Motors (HPG)
- 1.65 in. (42 mm)
- 2.36 in. (60 mm)
- 3.54 in. (90 mm)
High Accuracy, Non-backlash Gears


The HPG gear combine a harmonic and planetary gear speed-reduction mechanism allowing for high positioning accuracy, high permissible torque and high maximum instantaneous torque. The HPG Gears are available with a center shaft or surface mount to meet the needs of various applications.
Neugart High Torque Planetary Gear Stepper Motor (PLE)
- 1.65 in. (42 mm)
- 2.36 in. (60 mm)
- 3.54 in. (90 mm)

Higher Torque, Lower Backlash Gears
The PLE Series gearhead employs optimized planetary gear mechanism and is composed of fully hardened gears. Sun gear and planetary gears are honed (precision final machining after heat treatment). This technology guarantees extremely high torque density, long life, low backlash, and so on.
*Motor and Gearhead ship separately and must be assembled using the included gasket and screws

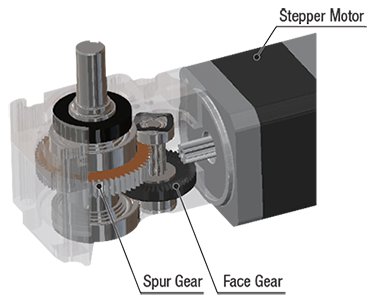
Right-Angle Face / Spur Gear (FC)
- 1.65 in. (42 mm)
- 2.36 in. (60 mm)

The right-angle FC geared type is a compact orthogonal shaft geared motor made up of a disc-shaped gear (face gear) meshing with a spur gear. By combining it with an AZ series motor, high precision, high strength and space savings is possible at an affordable price.
Harmonic Gear Stepper Motors (HS)
- 1.65 in. (42 mm)
- 2.36 in. (60 mm)
- 3.54 in. (90 mm)

High Accuracy, Non-Backlash Performance Gears
The mechanical life, permissible torque and maximum torque are improved (compared with conventional models).
Improved Rate Life (Twice the length of conventional models)
The rate life has been increased from 5,000 hours (conventional model) to 10,000 hours.
[Except for 1.65 in. (42 mm) frame size]
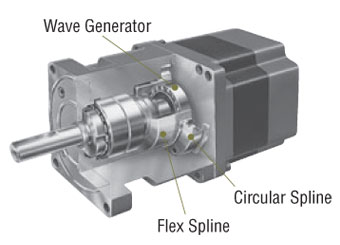
The harmonic gear utilizes the metal’s electrodynamics property. It is comprised of three basic components, a wave generator, flex spline and circular spline.
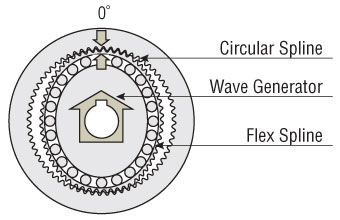
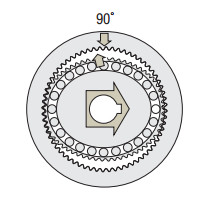
Rotating the wave generator (input) clockwise while keeping the circular spline fixed in position will subject the flax spline to elastic deformation, causing a gradual shift in the point of engagement between the circular spline and flex spline.
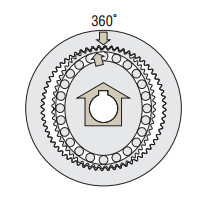
When the wave generator completes one revolution, the flex spline has rotated two fewer teeth than the circular spline has, resulting in the movement of the flex spline for the difference in the tooth count (two teeth) in the opposite direction of the wave generator's rotation (i.e. counterclockwise). This movement translates into output, thereby reducing the speed.
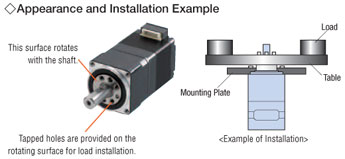
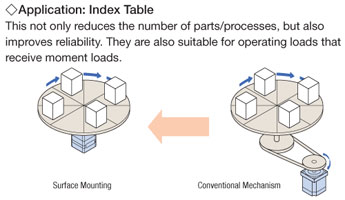
Surface Installation of Load
The harmonic geared type permits installation of load directly on the rotating surface integrated with the shaft. [Expect for geared stepper motors with a frame size of 3.54 in. (90 mm)].
Electromagnetic Brake Option
- 1.65 in. (42 mm)
- 2.36 in. (60 mm)
- 3.35 / 3.54 in. (85 / 90 mm)

These products have built-in power-off activated electromagnetic brakes. When power is accidentally cut off due to a blackout or other unexpected events, the electromagnetic brake holds the load in position to prevent it from dropping or moving. Also, when the motor is at standstill, it is held by the electromagnetic brake. It is possible to suppress the heat generated from the motor by turning off the motor current.
AZ Series AC Input Drivers

The αSTEP AZD (AC Input) Drivers offers superior high speed performance, high functionality and closed loop control. There are no external sensors to buy as the motor and driver complete the system. Advanced operation and function control is included through our MEXE02 software (free download). The αSTEP AZD (AC Input) Drivers can perform quick positioning operations over a short distance without the need for tuning, while providing smooth performance.
- Built-in Protective Functions
- Emergency Torque Off Function
- Pulse Input, Pulse Input with RS-485 Communications, Built-in Controller (Network), EtherCAT, EtherNet/IP™ or PROFINET Types
- Single-Phase 100-120 VAC or Single-Phase/Three-Phase 200-240 VAC
- For use with αSTEP AZ Series Motors (AC Input)
![]()
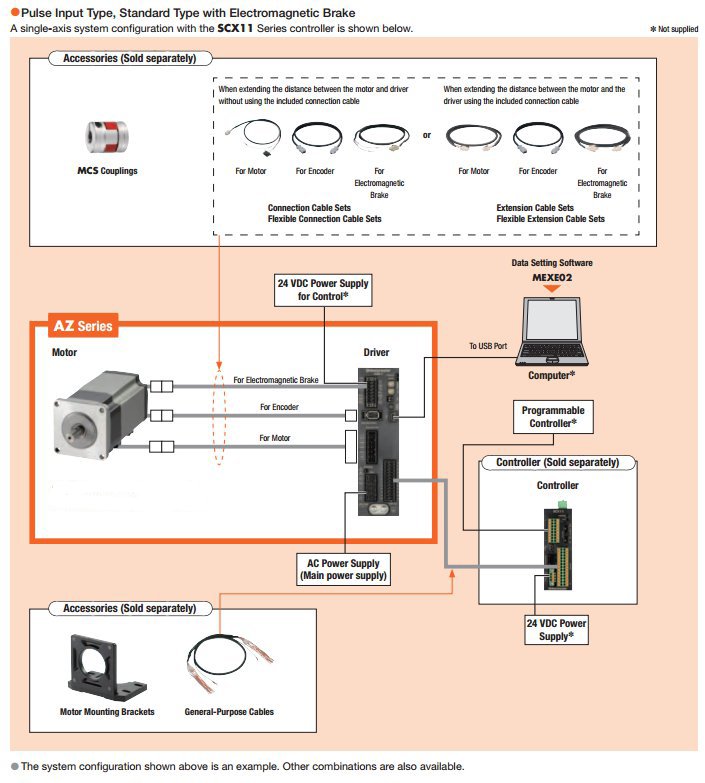
SCX11 Universal Controller

The SCX11 is a highly-functional and sophisticated controller equipped with program editing and execution functions. Use the SCX11 as a stored program controller to connect to any of Oriental Motor's standard pulse input drivers. The SCX11 is also able to control the motor via serial communications such as USB, RS-232C and CANopen.
Network Gateways

The communication protocol of the master controller, Factory Automation (FA) network, is converted to Oriental Motor's own RS-485 communication protocol. Connection to Oriental Motor's network compatible products is completed with one RS-485 communication cable.
- Compatible Networks:
CC-Link, MECHATROLINK-II, MECHATROLINK-III, EtherCat
![]()
![]()
![]()
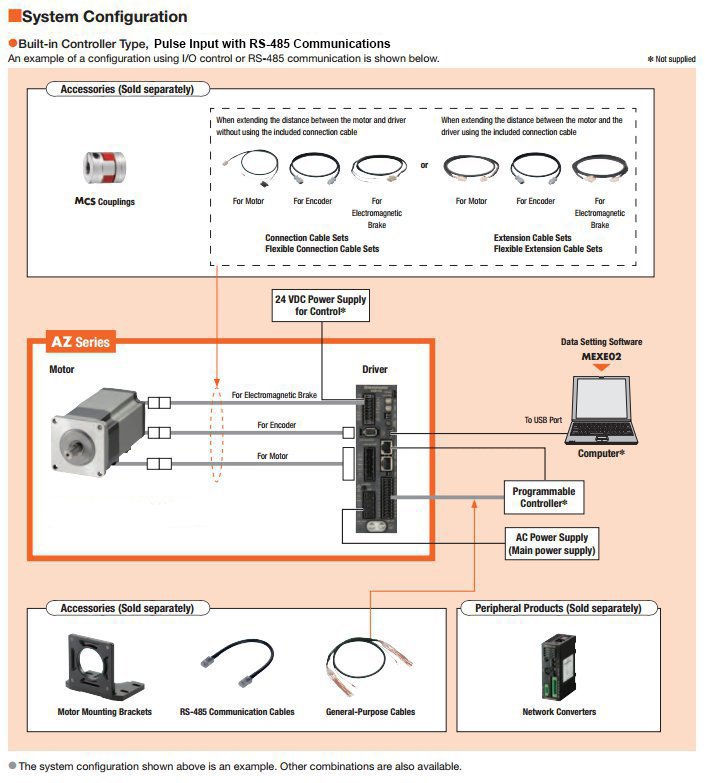
Cables

These cables are used to connect or extend the distance between the motor and driver.
Required (sold separately).
Use a flexible motor cable if the motor is installed on a moving part or its cable will be flexed.
Flexible Couplings

This three-piece coupling adopts an aluminum alloy hub and a resin spider. The simple construction ensures that the high torque generated by a gear motor can be transmitted reliably. The proper elasticity of the spider suppresses motor vibration.
Mounting Brackets

Mounting brackets are convenient for installation and securing a stepper motor or geared stepper motor.
System Configuration
Motor & Driver Combinations
AC Input Type
|
Built-in Controller (Network) |
Pulse Input |
||||||
Gear |
Rear |
Size |
Motor P/N |
Driver P/N |
Rear |
Size |
Motor P/N |
Driver P/N |
Round |
Single |
46 |
AZM46AC |
AZD-♢D |
Single |
46 |
AZM46AC |
AZD-♢ |
66 |
AZM66AC |
66 |
AZM66AC |
|||||
69 |
AZM69AC |
69 |
AZM69AC |
|||||
98 |
AZM98AC |
98 |
AZM98AC |
|||||
911 |
AZM911AC |
911 |
AZM911AC |
|||||
Electromagnetic |
46 |
AZM46MC |
Electromagnetic |
46 |
AZM46MC |
|||
66 |
AZM66MC |
66 |
AZM66MC |
|||||
69 |
AZM69MC |
69 |
AZM69MC |
|||||
98 |
AZM98MC |
98 |
AZM98MC |
|||||
TS Geared |
Single |
46 |
AZM46AC-TS☐ |
AZD-♢D |
Single |
46 |
AZM46AC-TS☐ |
AZD-♢ |
66 |
AZM66AC-TS☐ |
66 |
AZM66AC-TS☐ |
|||||
98 |
AZM98AC-TS☐ |
98 |
AZM98AC-TS☐ |
|||||
Electromagnetic |
46 |
AZM46MC-TS☐ |
Electromagnetic |
46 |
AZM46MC-TS☐ |
|||
66 |
AZM66MC-TS☐ |
66 |
AZM66MC-TS☐ |
|||||
98 |
AZM98MC-TS☐ |
98 |
AZM98MC-TS☐ |
|||||
PS Geared |
Single |
46 |
AZM46AC-PS☐ |
AZD-♢D |
Single |
46 |
AZM46AC-PS☐ |
AZD-♢ |
66 |
AZM66AC-PS☐ |
66 |
AZM66AC-PS☐ |
|||||
98 |
AZM98AC-PS☐ |
98 |
AZM98AC-PS☐ |
|||||
Electromagnetic |
46 |
AZM46MC-PS☐ |
Electromagnetic |
46 |
AZM46MC-PS☐ |
|||
66 |
AZM66MC-PS☐ |
66 |
AZM66MC-PS☐ |
|||||
98 |
AZM98MC-PS☐ |
98 |
AZM98MC-PS☐ |
|||||
HPG Geared Type |
Single |
46 |
AZM46AC-HP☐ |
AZD-♢D |
Single |
46 |
AZM46AC-HP☐ |
AZD-♢ |
AZM46AC-HP☐F |
AZM46AC-HP☐F |
|||||||
66 |
AZM66AC-HP☐ |
66 |
AZM66AC-HP☐ |
|||||
AZM66AC-HP☐F |
AZM66AC-HP☐F |
|||||||
98 |
AZM98AC-HP☐ |
98 |
AZM98AC-HP☐ |
|||||
AZM98AC-HP☐F |
AZM98AC-HP☐F |
|||||||
Electromagnetic |
46 |
AZM46MC-HP☐ |
Electromagnetic |
46 |
AZM46MC-HP☐ |
|||
AZM46MC-HP☐F |
AZM46MC-HP☐F |
|||||||
66 |
AZM66MC-HP☐ |
66 |
AZM66MC-HP☐ |
|||||
AZM66MC-HP☐F |
AZM66MC-HP☐F |
|||||||
98 |
AZM98MC-HP☐ |
98 |
AZM98MC-HP☐ |
|||||
AZM98MC-HP☐F |
AZM98MC-HP☐F |
|||||||
Harmonic |
Single |
46 |
AZM46AC-HS☐ |
AZD-♢D |
Single |
46 |
AZM46AC-HS☐ |
AZD-♢ |
66 |
AZM66AC-HS☐ |
66 |
AZM66AC-HS☐ |
|||||
98 |
AZM98AC-HS☐ |
98 |
AZM98AC-HS☐ |
|||||
Electromagnetic |
46 |
AZM46MC-HS☐ |
Electromagnetic |
46 |
AZM46MC-HS☐ |
|||
66 |
AZM66MC-HS☐ |
66 |
AZM66MC-HS☐ |
|||||
98 |
AZM98MC-HS☐ |
98 |
AZM98MC-HS☐ |
|||||
♢ = A (Single 100-120 VAC) / C (Single-Three 200-240VAC)
☐ = Gear Ratio
CAD / Manual Search
To locate product CAD and Operator Manuals please search using the product Item Number.
Downloads
Technical Articles
Reference
Order Literature

Videos



Hybrid Servo Motor / Stepper Motor Drivers*
Linear Actuators

Rotary Actuators
